The electronic stability control (ESC) recognises critical driving situations, such as the risk of skidding, and systematically prevents the car from doing so.
In order that the ESC can respond to critical situations, the system must constantly receive information.
For instance: which way the driver is steering and where the car is moving. The system receives the answer to the first question from the steering angle sensor and the ABS wheel speed sensors on the wheels. From these two pieces of information, the controller calculates the desired steering direction and the intended driving behaviour of the car. Other important data are the yaw rate and lateral acceleration of the vehicle. Using this information, the control unit calculates the actual state of the vehicle.
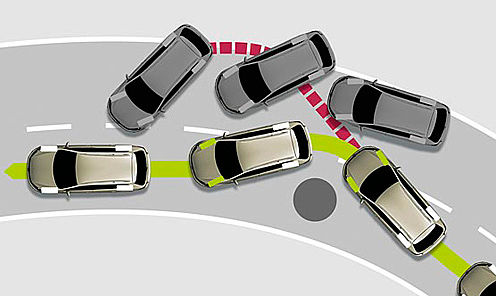
ESC prevents instability of the car when cornering which can occur either when driving at an inappropriate speed, as a result of an unpredictable change in the road surface (wetness, slickness, dirt), or emergency evasive action (the "Elk test"). In this event, it does not matter whether the instability manifests itself through understeer, ie: when the car, despite steering at full lock, moves to the outer edge of the bend, or by oversteer (the rear end breaks away).
The computer unit of the ESC detects the type of instability based on the data provided by the sensor technology and controls the correction by intervening in the braking system and engine management.
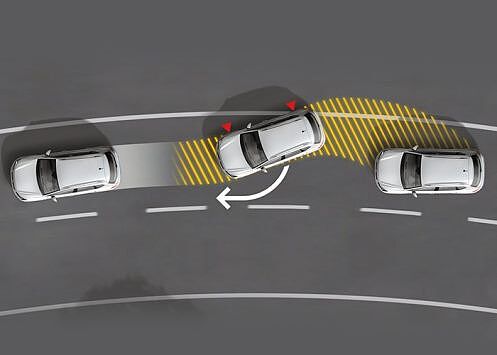
In the event of understeer, the ESC decelerates the inside rear wheel. Simultaneously the ESC reduces the engine power until the car has stabilised again. ESC prevents oversteer by selectively activating the front brake on the outside of the bend and intervening in the engine and transmission management.
 About SEAT
About SEAT Contact Us
Contact Us